Robot Car Developed by The Students of TMU
Research allows you to follow your interests, discover something new, sharpen your problem-solving aptitudes, and challenge yourself in new ways. Working on a research project, students got the opportunity to work closely with experienced researchers and learn from them. The Teerthanker Mahaveer University enables students and scholars to boost human knowledge via analysis, innovation, and insight. Students of TMU have developed a Robot Car which can detect and avoid obstacles.
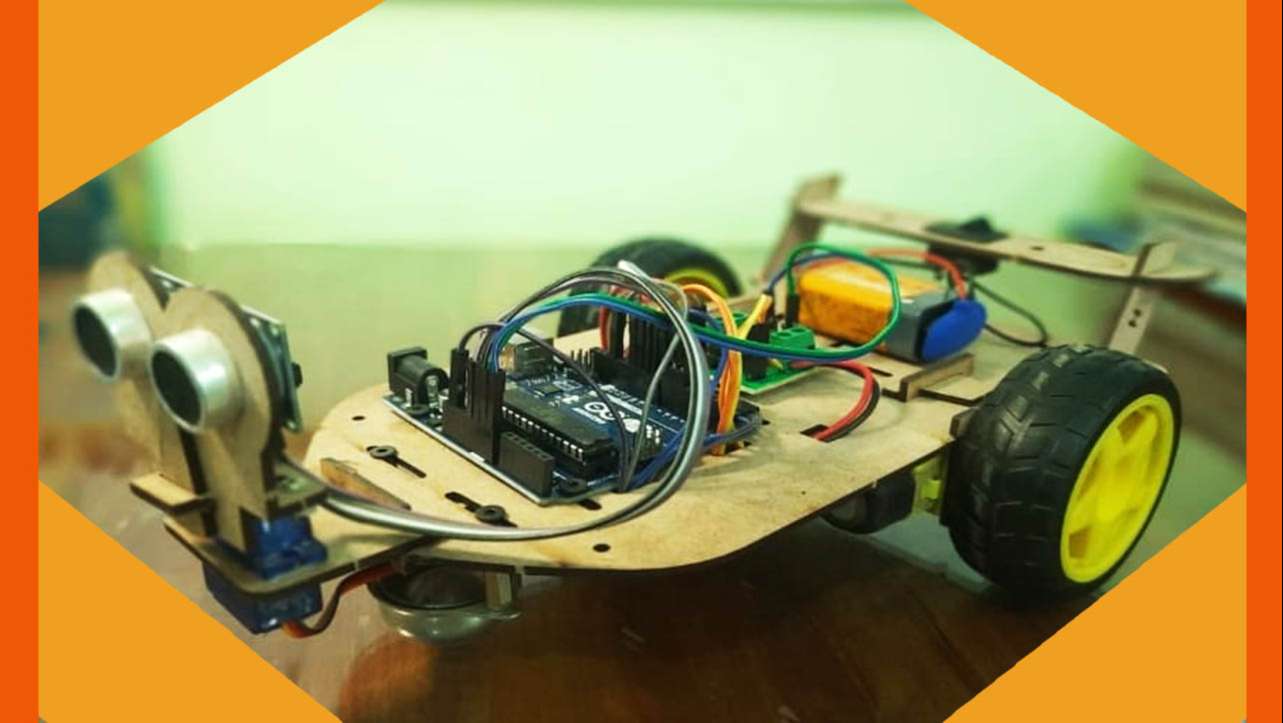
This project describes an obstacle avoidance robot vehicle which is controlled by an ultrasonic sensor. The robot is made using an ultrasonic sensor and it is controlled by an Arduino microcontroller. Ultrasonic sensor fixed at the front portion of the robot vehicle. The sensor gets the data from the surrounding region through mounted sensors on the robot. The sensor insight the obstacle and deviate its path to choose an obstacle-free path. The sensor will send the data to the controller and compare it with the controller to decide the movement of the robot's wheel. The robot wheel movement and direction will be based on the sensing of the ultrasonic sensor and using a wheel encoder. This vehicle is used for detecting obstacles and avoiding collisions. We have programmed the controller to be used with Arduino IDE.
This project involves the design and implementation of an intelligent obstacle-avoiding robot car. The objective of this project is to implement a robot car, which while moving should have the ability to detect obstacles in its path and change direction where obstacles are present without any form of external influence. The new direction to be taken to avoid collision is the direction that has the most distance between the obstacle and the sensor and this is determined by the robot based on sensor inputs.
This implementation was done using an ultrasonic wave sensor, which measures distance by sending pulses. Also, the movement of the servo motor (for sensor movement) and the DC motors (for wheel movement) are controlled by the motor driver shield to enable the obstacle avoidance function. The commands are sent to the Arduino microcontroller chip which serves as the main control of the robot car, as it controls the sensor and car movement. The implemented robot car can successfully detect and avoid obstacles within the line of sight of the Ultrasonic sensor used.
TMU’s Faculty of engineering, having its foundation on the ethos of excellence in research and innovation and creating positive social impact, has come out with flying colours in making a mark in the education landscape. It is recognised as one of the top-ranked engineering institutes in the surveys conducted by Dataquest, CSR-GHRDC and ELETS-Digital learning 2021. It has come up with new trends that align with the current world. Here, the college concentrates on hands-on training along with imparting sound academic knowledge to cater to the recent requirements of industries to aspiring engineers.

